Некоторое время назад, я публиковал фото собранной платы транзисторного усилителя КВ диапазано со странным названием EB-104. На каком ресурсе и когда точно, вспомнить уже не смогу.
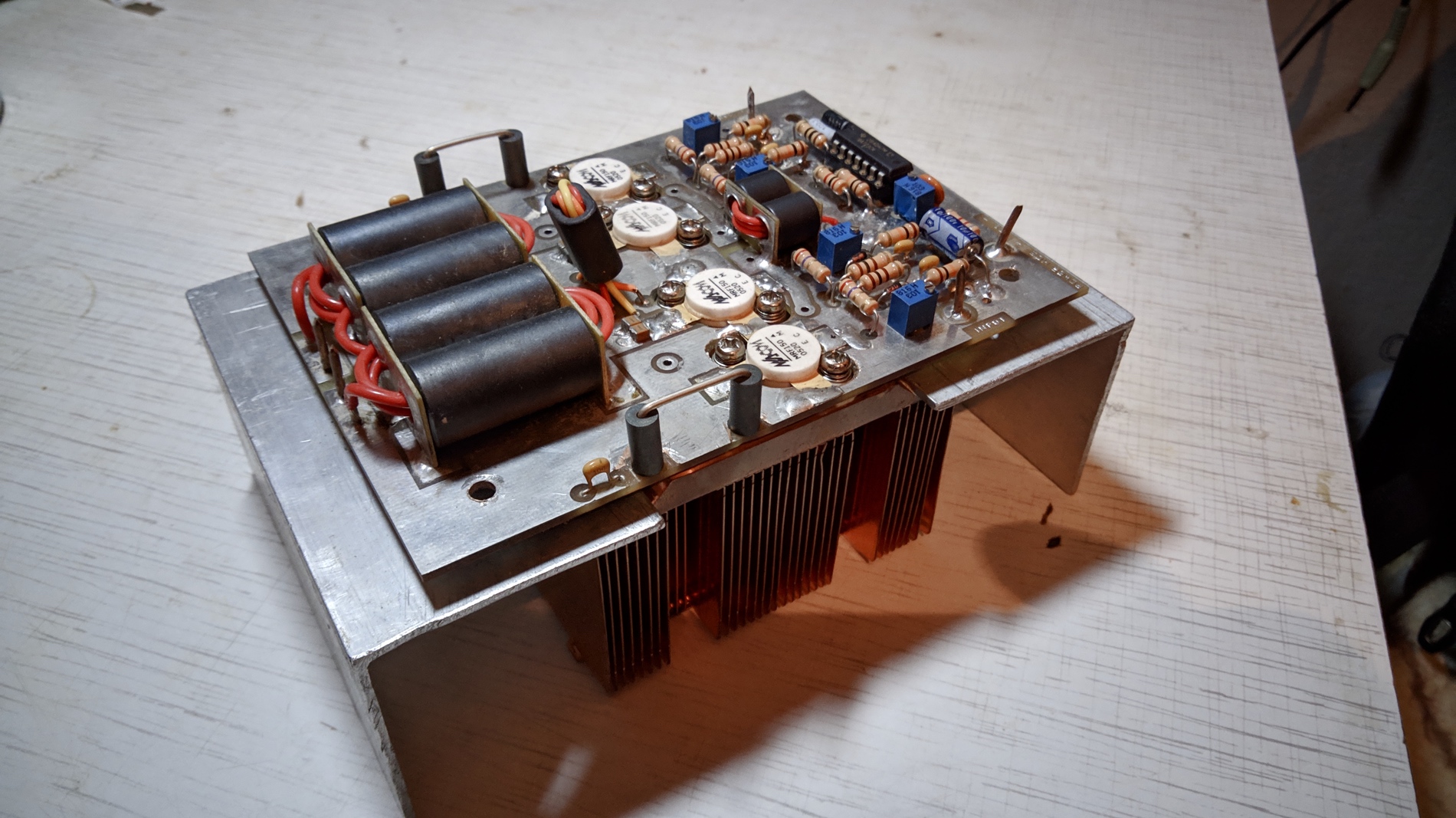
Вот один из тех кадров:
Тут виден полностью медный радиатор и алюминиевый «уши» задуманные как элемент крепления и для увеличени площади радиатора. В те времена, этот проект затормозился, а потом и совсем был заброшен. Причины были разные, но вышло, как вышло.
И вот в наступившем году, проект линейного усилителя на транзисторах, с отдаваемой мощностью в 500 Ватт, возродился аки Феникс.
Был приобретен источник питания 50В, мощностью 1000Вт, подходящий по размерам и дизайну корпус и работа закипела.
В первой части я рассказывал о вариантах дисплеев подходящих для замены «полосатого безобразия» в трансивере IC-756. Мы сняли болезный дисплей и использовали его как донора разъема для штатного шлейфа. Там же есть изображение нового, только что полученного экранчика DEM320240ESBH-PW-N. Приобрёл я его в одном из европейских интернет магазинов, но сразу же отмечу, что таких дисплеев там больше нет. Они распродавали остатки и мне достался последний.
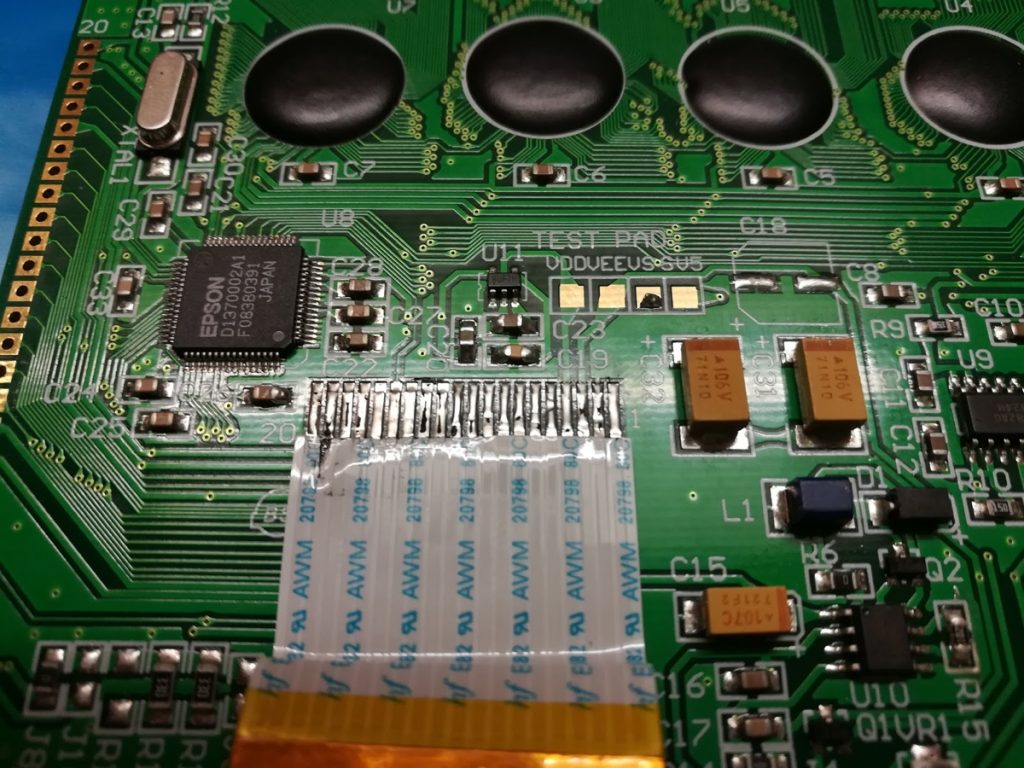
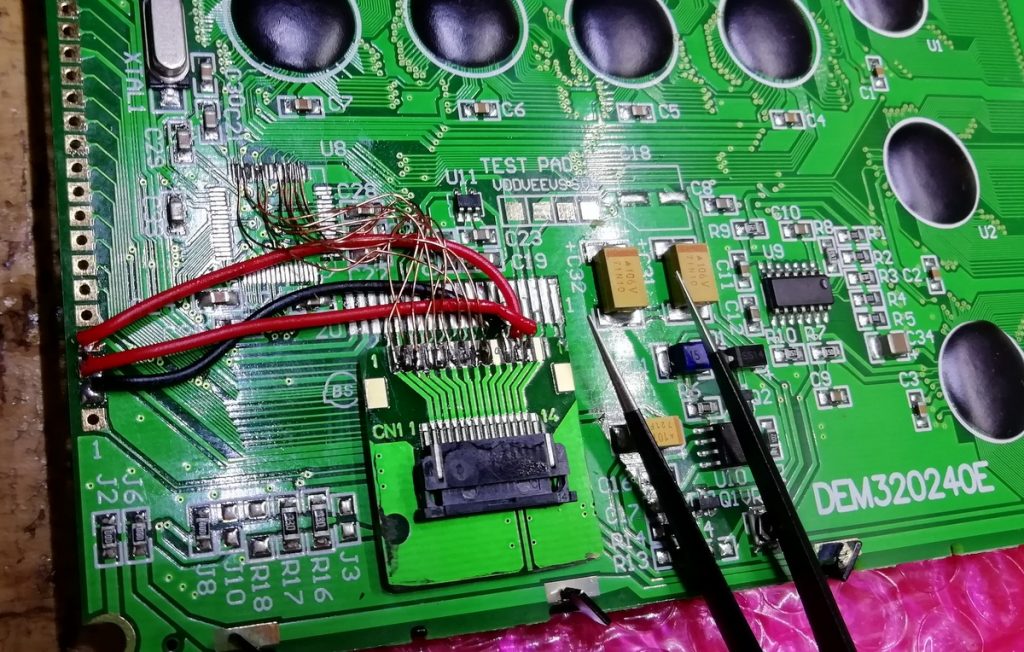
После удаления с его платы контроллера, а именно микросхемы S1D13700 и соединения контактов разъёма и дисплея всё это безобразие выглядит вот так. Платку-переходник, вырезанный из старого дисплея, я прикрепил двухсторонним скотчем.
Разъём припаян к контактным площадкам удаленной микросхемы
Для подключения к весьма маленьким площадкам под выводы микросхемы я использовал тонкие эмалированные проводнички. Да, пайка не из простых, но не невозможна же! Мне тут по случаю досталось удовольствие подобной пайки ещё более мелкого контроллера флеш памяти, ничего справился. Сейчас рассмотрим схему и разберемся что и куда нужно паять.
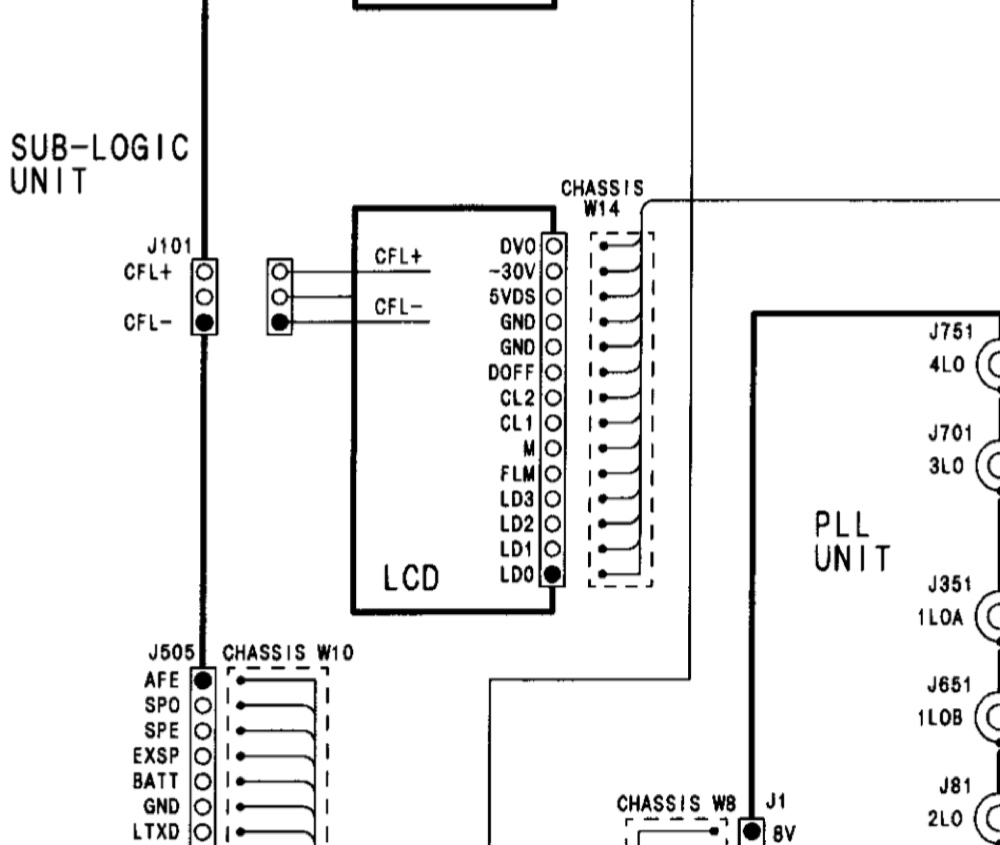
Фрагмент схемы межблочных соединений IC756
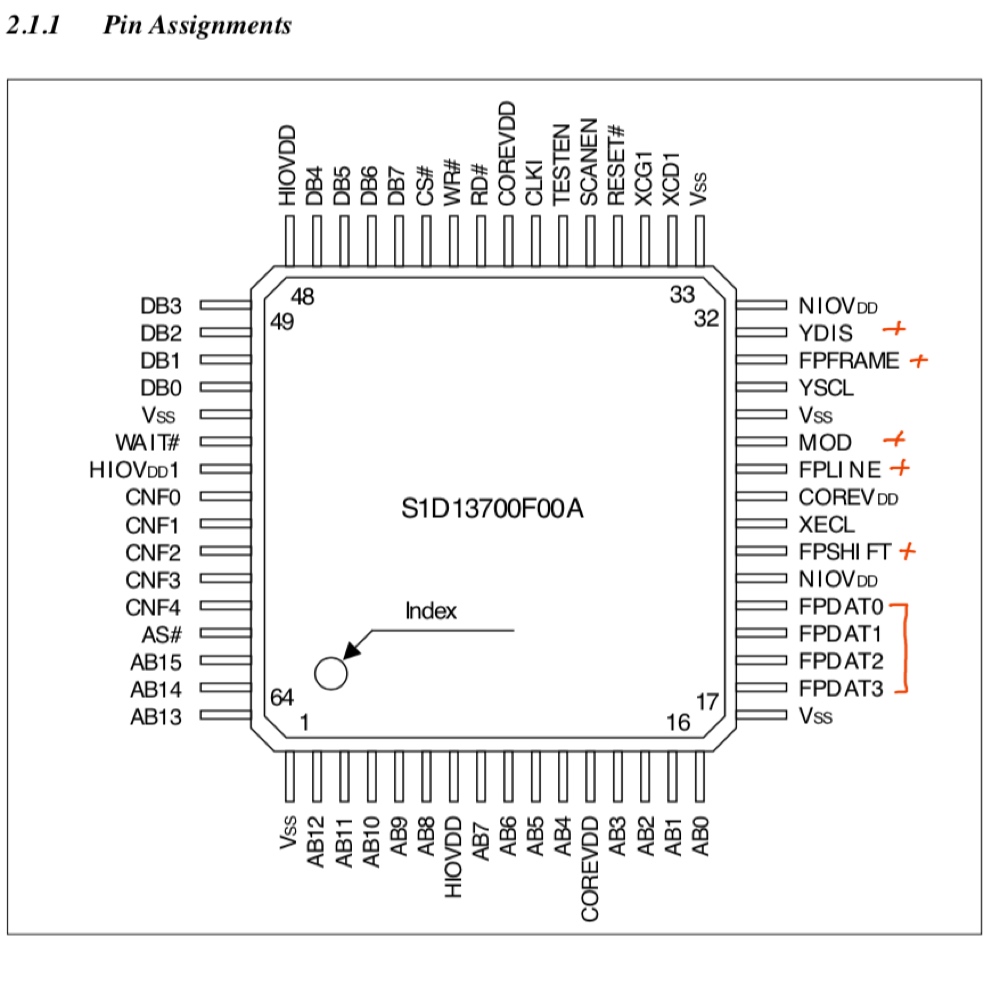
Вот наименование выводов на нашем переходнике. На следующей картинке изображено расположение выводов микросхемы контроллера типа s1d137000. Выводы контроллера идущие к дисплейной части, т.е. куда будем подключаться, я отметил красными метками. На плате дисплея они сосредоточены в верхней части удаленного контроллера (см. фото)
Фрагмент datasheet контроллера S1D13700
В табличку вынесены данные по соединению контактов для двух видов контроллеров. Это на случай если вы найдёте подходящий дисплей с отличным от моего контроллером. Мой вариант слева. Тут всё понятно без объяснений. Только отмечу, что нумерация контактов на переходнике с разъёмом слева-направо (см. фото)
S1D137000
RA 8835
Контакт микросхемы
Контакт разъёма
Контакт микросхемы
Контакт разъёма
FPDAT0 – FPDAT3
D0 — D3
XD0 — XD3
D0
— D3
FPLINE
CL1
LP
CL1
FPSHIFT
CL2
XSCL
CL2
FPFRAME
FLM
YD
FLM
YDIS
DOFF
YDIS
DOFF
MOD
M
WR
M
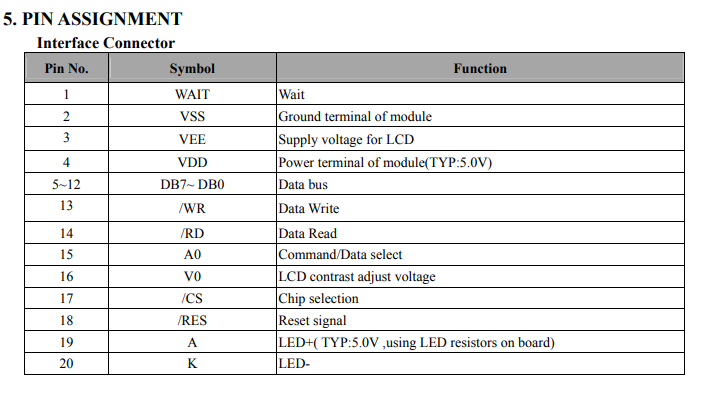
А сейчас рассмотрим контакты интерфейса самого дисплея. Они находятся слева и нумерация начинается с нижнего из них. Два самых верхних это питание LED подсветки, т.н. «А» и «К» контакты. Сюда мы подключаем провод с разъёмом, позаимствованный от неисправного дисплея. Вот фрагмент документации от DEM320240ESBH-PW-N с назначением контактов
Назначение контактов дисплея DEM320240ESBH-PW-N
Теперь внимательно. Нас будут интересовать VDD, VSS — питание и шестнадцатый контакт V0 — регулировка контрастности. Соединяем 11 контакт платы переходника GND со 2 контактом, 12 контакт переходника 5VDS с четвёртым контактом дисплея, а крайний 14 контакт DV0 идет на V0 — LCD contrast adjust voltage, 16 контакт дисплея. Очень тщательно проверьте все соединения и уже скоро можно будет включать трансивер.
Аккуратно устанавливает дисплейный модуль на место. В принципе он превосходно входит, правда крепление придется немного доработать, но это не сложно.
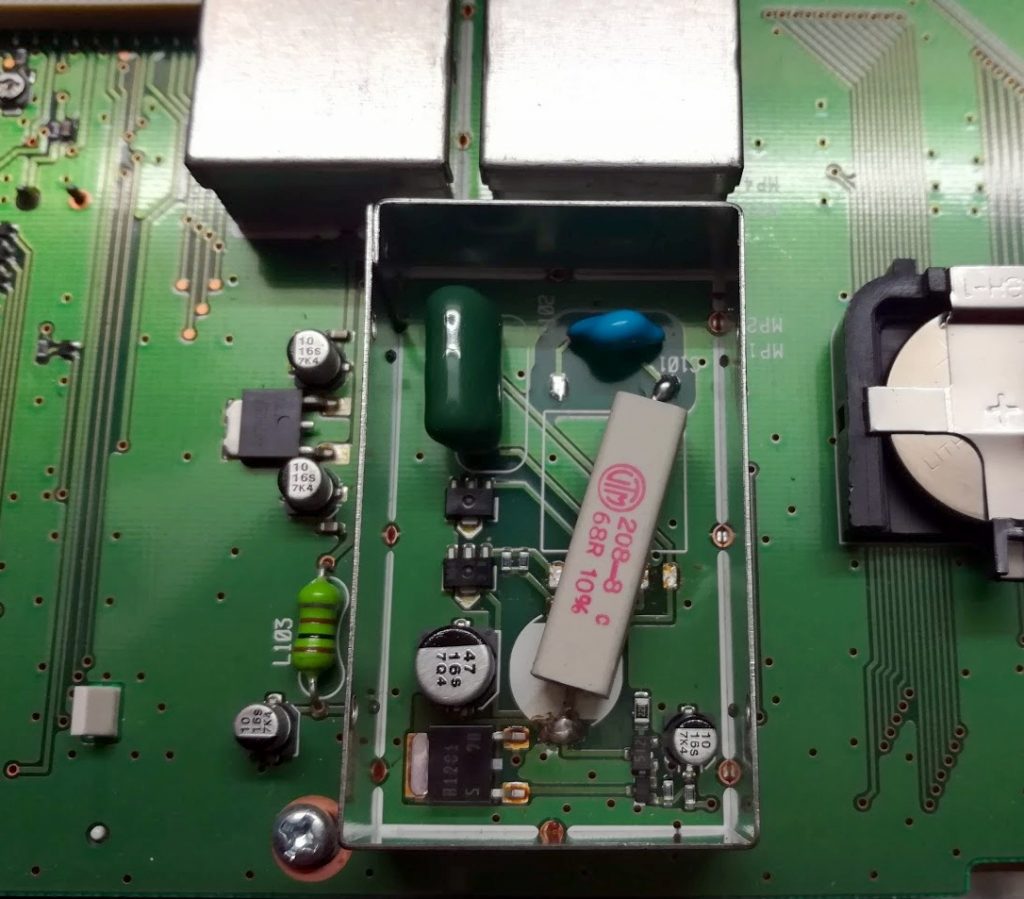
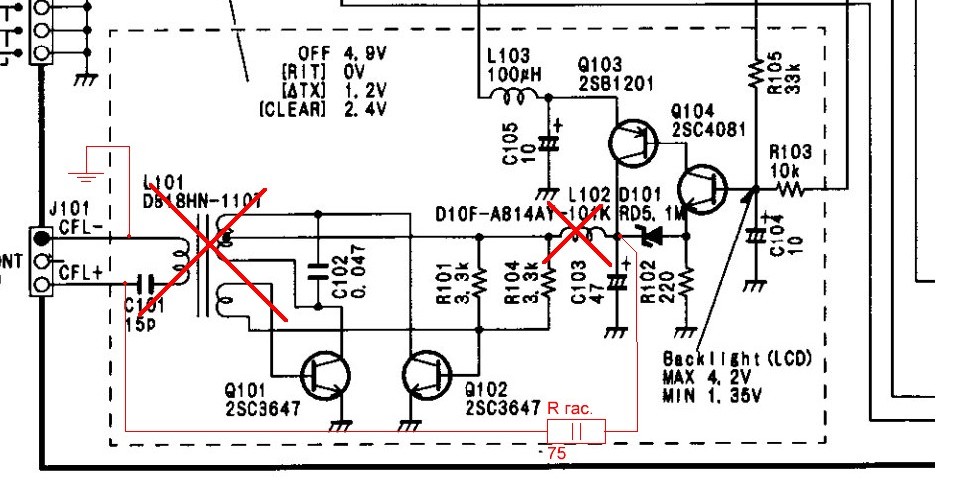
Самое время заняться модификацией блока подсветки на плате лицевой панели трансивера. Вся переделка заключается в удалении дросселя и импульсного трансформатора преобразователя и установке вместо них токограничивающего сопротивления. По документам, диоды LED подсветки нашего дисплея питаются 120 мА при напряжении в 3,1 Вольта. Расчеты показываю, что гасящее сопротивление должно быть порядка 75 Ом при напряжении питания 13 В. В этом случае на нем будет рассеиваться чуть больше одного ватта мощности.
Гасящее сопротивление в драйвере LED подсветки
На фото резистор немного другого номинала, это пробная версия. На самом деле тут нужно установить 75 Ом 2W резистор и всё будет правильно, светодиоды подсветки прослужат долго и не подведут вас.
Модификация в модуле преобразователя подсветки трансивера
Тут на схеме я изобразил всё описанные выше манипуляции. L101 и L102 удаляем и соединяем указанные точки резистором. Один из выводов разъёма J101 не забываем соединить перемычкой с общим проводом. Эту перемычку удобно сделать прямо на самом разъёме.
Комментарии к записи Начни display заново (продолжение) отключены
Думаю нужно рассказать, про небольшой проект последних недель. В русскоязычном интернете этой информации почти нет, так пусть будет здесь.
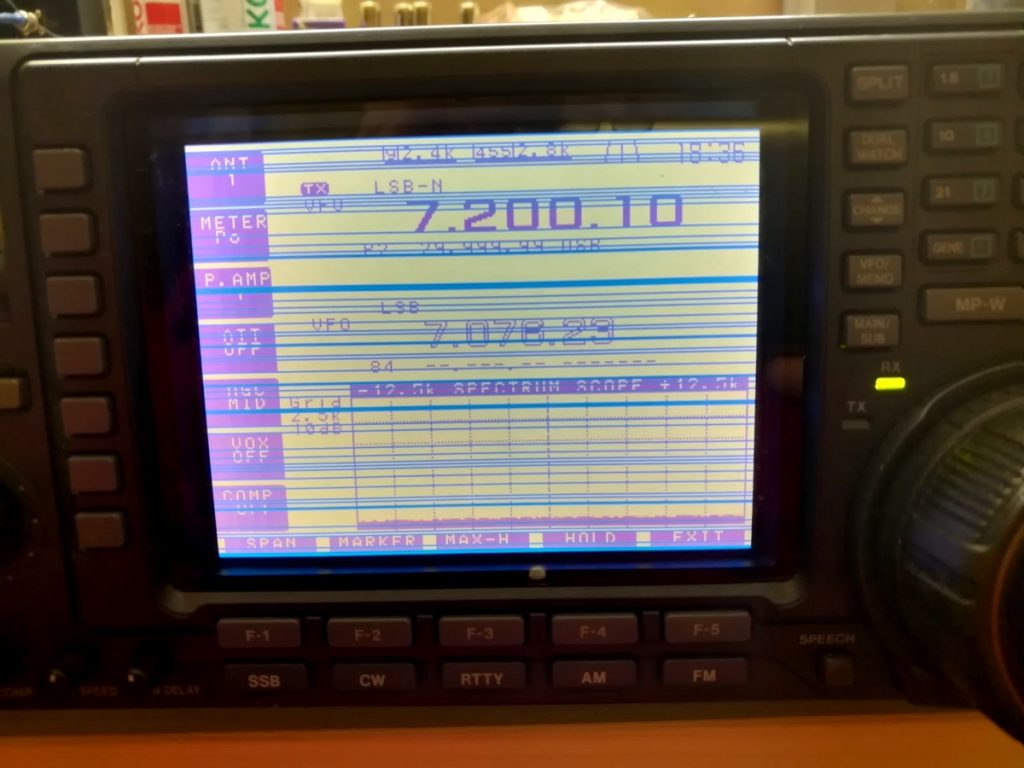
Попросили меня посмотреть, что можно сделать с извечной проблемой популярного аппарата Icom IC756. Многим наверное знаком такой дефект как на картинке, полосы всё расширяются и расширяются и окончательно скрывают полезную информацию.
Понятно, что нужно менять дисплей, что тут сложного купил новый и поставил на место. А вот и нет, «купило-притупило» и не потому что денежку нужно платить за новый, а просто нет больше таких экранов, не выпускают. И даже если, найдёте оригинальный Sanyo дисплей для IC756, никто не гарантирует возвращения проблемы. Изготовитель признал неудачной конструкцию своих дисплеев и подверженность их «полосатой неисправности» прекратив производство.
Немного погуглив я нашел замену родному экранчику. Широко известная WinStar производит похожий дисплей WG320240D. Тут важно обратить внимание на последнюю букву в обозначении — «D», это обозначает исполнение дисплея без контроллера на борту. Китайский дисплей совсем даже не плох как замена больного Sanyo, несложное подключение, LCD подсветка, конструктивная совместимость и поддержка настройки контрастности через интерфейс аппарата.
Подключение китайского дисплея от WinStar
Одно плохо в этом варианте, я не смог найти за разумные деньги и сроки этот самый дисплей. Очень много предложений и на Али, и на Ebay, но всё не то, или за заоблачные деньги, или не подходящий тип. Пришлось поплотнее пообщаться с Google’ем, а он «знает всё»… Таким образом выяснилась следующая ситуация.
У оригинальных дисплеев Sanyo для Icom IC756 нет контроллеров, т.н. mcu как нет и источника отрицательного напряжения для регулировки контрасности, все эти схемы находятся на материнской плате трансивера. Значит, нам нужен дисплей без контроллера и без источника отрицательного напряжения. На сегодняшний день можно приобрести 4,7′ или так называемые 5-дюймовые дисплеи с встроенным mcu и его 20-контактным или подобным интерфейсом. Возникает вопрос: можем ли мы использовать дисплеи такого типа для нашего трансивера? Ответ: ДА они в 90% случаев подойдут для IC756! Главное подобрать правильный размер. Это важно! Даже не пробуйте устанавливать дисплей другого размера.
Все дисплеи с mcu на борту используют одни и те же микросхемы mcu, или их варианты такие как S1D13700, RA8835 и т.д. Нам они просто не нужны, поэтому лучшее решение — удалить микросхему mcu с платы. Не советую использовать для этого термофен, так как с другой стороны расположен рассеиватель подсветки изготовленный из нежного пластика. Ну или на свой страх и риск.
Дисплей с контроллером от Display Elektronik GmbH
Именно такой дисплей от немецкой фирмы Display Elektronik GmbH мы и будем внедрять в наш трансивер. Итак начнем. Для подключения шлейфа к нашему новому дисплею понадобится подходящий разъём. Воспользуемся платой старого экрана для изготовления переходника.
Далее в стиле слайдшоу…
Неисправный дисплей демонтированНаметил линии отреза Пара минут и переходник готов
В следующий раз я расскажу что и как нужно подключить на дисплейной плате и какие модификации понадобятся в самом трансивере.
Комментарии к записи Начни display заново отключены
В прошлые разы я рассказывал о своём поворотном устройстве для УКВ антенн. Там, в самом начале, есть фотография этого механизма, точнее его части отвечающей за поворот по азимуту. Его основное предназначение менять направление антенны в горизонтальной плоскости, в идеале на 360 градусов. Чаще всего из-за различных ограничений этот угол несколько меньше, но совсем незначительно. А вот механизмы изменения положения антенны по углу места различаются на две основные группы — антенна поднимается от 0 до 90 градусов по вертикали и 180 градусная элевация при которой антенна поворачивается в вертикальной плоскости от горизонта, до горизонта через зенит.
Для проведения QSO через искусственные спутники земли удобнее использовать второй вариант, в этом случае антенна сопровождает спутник непрерывно всё время нахождения его в зоне радиовидимости. При 90 градусной элевации, система слежения за спутником будет вынуждена развернуться на 360 градусов в случае прохождения орбиты через «север» поворотной системы. Такое поведения механизма наведения антенны приведет к потере драгоценного времени радиовидимости спутника.
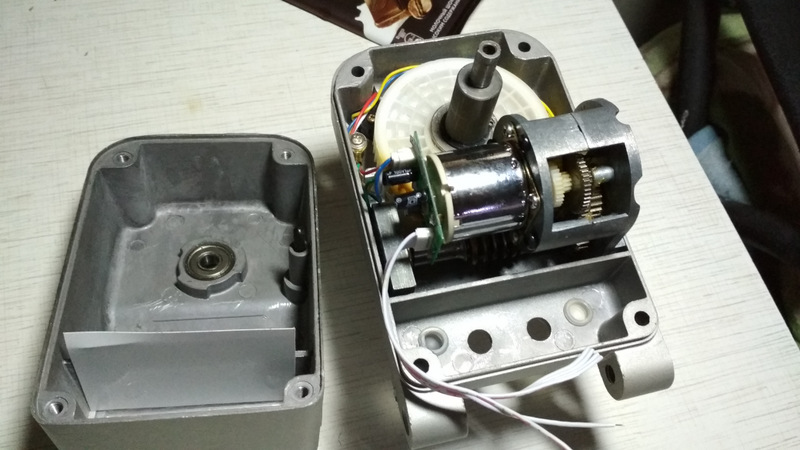
Исходя из этих размышлений я выбрал в качестве механизма «по углу места» широко распространенный мотоподвес от спутниковой антенны.
Такие устройства можно приобрести во многих онлайн магазинах как новые так и б/у за недорого. Мне приобретать не пришлось, имелся в запасе комплектик. Начнем с того, что удалим ненужное, кривой «хобот» и блок управления располагавшийся внутри корпуса.
И в результате у нас получится замечательное поворотное устройство, не имеющее обратного хода, благодаря червячной передаче, выдерживающее значительные нагрузки, с уже установлеными конечными выключателями ограничивающими поворот 180 градусами. В этом конкретном экземпляре поворотного устройства на валу расположена полная шестерня, что позволяет сделать полнооборотную поворотку, но мне это не нужно т.к. механизм предназначен для наведения антенны по углу места.
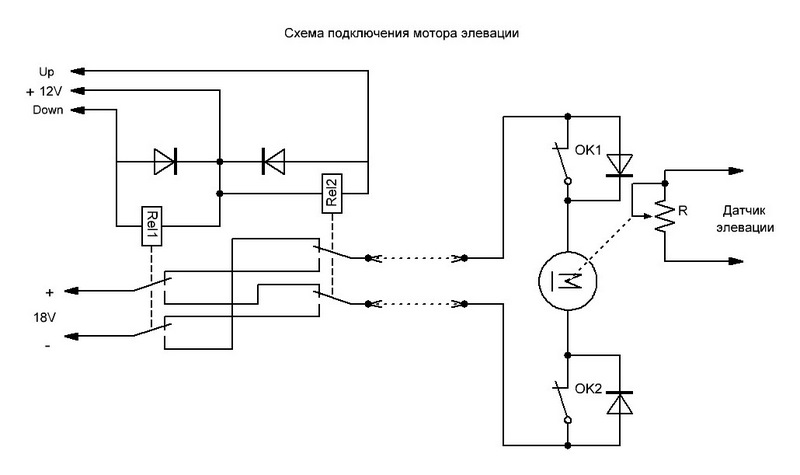
Управлять двигателем нашего механизма элевации будем через небольшой релейный блок. На схеме видим обыкновенный коммутатор полярности двигателя. Как уже упоминалось, редуктор оснащен нормально замкнутыми оконечными выключателями ОК1 и ОК2 которые в свою очередь зашунтированы диодами. Такая схема не позволит двигателю редуктора вращаться после размыкания оконечника пока не произойдет изменение полярности питающего напряжения, т.е. направление движения. Просто и эффективно.
Комментарии к записи Узел элевации, поворотного устройства УКВ антенн отключены
Ранее я упоминал, что выбранная мной плата контроллера не поддерживает внутрисхемное программирование контроллера. В связи с этим, для заливки программного обеспечения в микроконтроллеры мне понадобился программатор. Некоторое время назад я пользовался самодельным программатором для запуска своего УКВ маяка, но он (программатор) отказался работать с другими микроконтроллерами. Тогда я решил приобрести довольно распространённый и дешевый программатор — К150, но и он не захотел программировать PIC16F876, хотя с PIC12F629 справился замечательно.
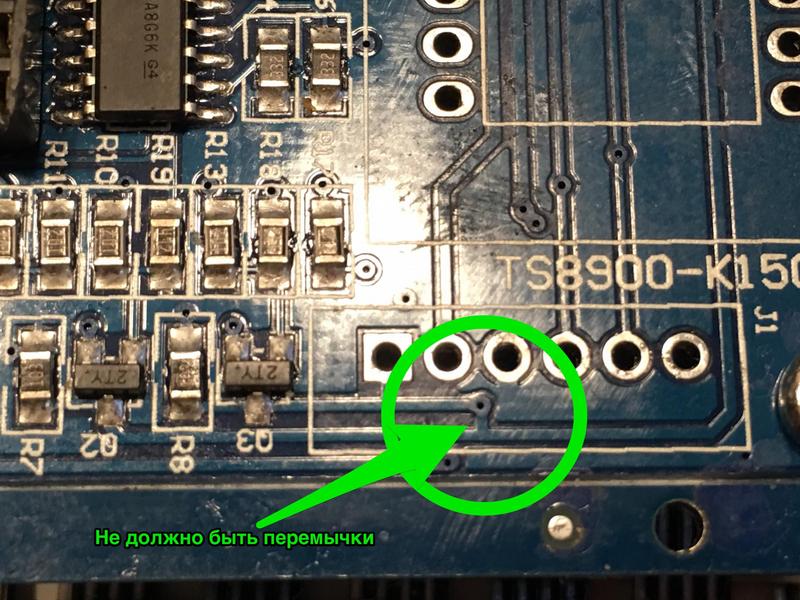
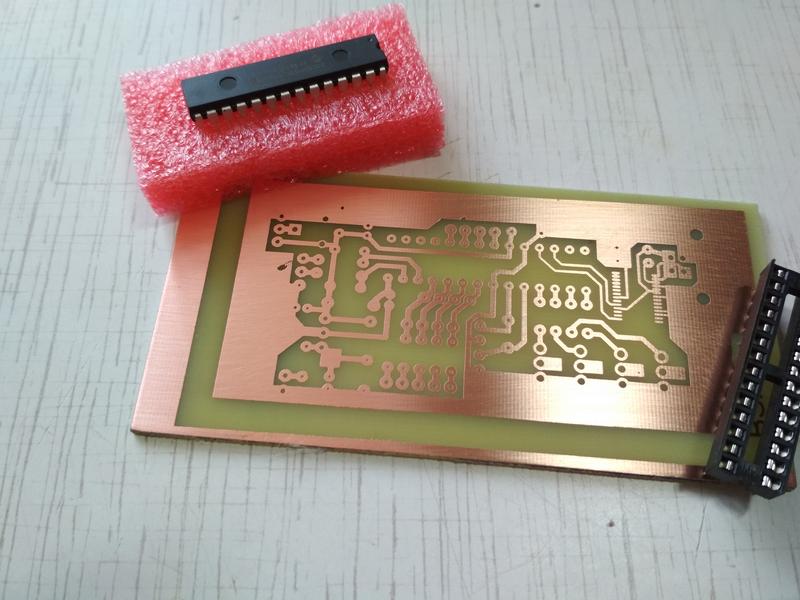
После разбирательств и матюков причина была найдена и устранена. Если судить по принципиальной схеме, на плате программатора есть небольшая ошибка — лишняя перемычка. Её наличие не позволяло включиться 12-и вольтовому встроенному преобразователю «напряжения программирования» Увидеть и устранить лишнее соединение можно подняв разъём J1. Смотрите на картинке:
После такой доработки, программатор замечательно и без ошибок залил программное обеспечение в микроконтроллеры.
ВАЖНО, хотя может и не своевременно. При работе с контроллером PIC12F629, не забудьте в первую очередь считать содержимое памяти и записать на листочке калибровочное число вашего экземпляра микроконтроллера — цифра в самом конце дампа памяти. Если вы потеряете это значение, то после стирания памяти запрограммированный заново контроллер может не заработать. В этом случае просто добавьте сохраненное вами число в конец дампа своей программы.
Хорошо! Программы в микроконтроллерах, макетное испытания на столе проведены, все работает замечательно. Начинаем собирать всё в корпус. Тут просто фото, пояснять ничего не надо. Отмечу лишь, что на лицевой панели, кроме цифровой индикации, задуман аналоговый указатель азимута подобный распространенным пультам поворотных устройств. Этим и обусловлено вертикальное расположение пульта поворотника в общем корпусе, что позволит вывести ось шагового двигателя на лицевую панель.
У задней стенки, скромно притулился трансформатор питания, я уже упоминал, что пульт американец по рождению и требует сетевое напрящение 110 вольт. Поэтому и появился в конструкции небольшой трансформатор 220V/110V. Про всё вторичные источники питания, а их немало, расскажу в следующий раз.
Комментарии к записи Поворотное устройство для УКВ антенн (продолжение_2) отключены
Сегодня покажу немного «схем электрических принципиальных». На картинке модуль шагового двигателя, реле отключения питания и общая схема управления поворотным устройством.
На рисунке выше, в схеме реле отключения питания «Cut Power» закралась ошибка, сопротивление в цепи диода имеет номинал 220 Ом, а резистор в цепи коллектора фототранзистора — 10 кОм. В качестве ключевого транзистора я использовал BC547, оптическая пара с открытым каналом досталась мне при разборке старого принтера.
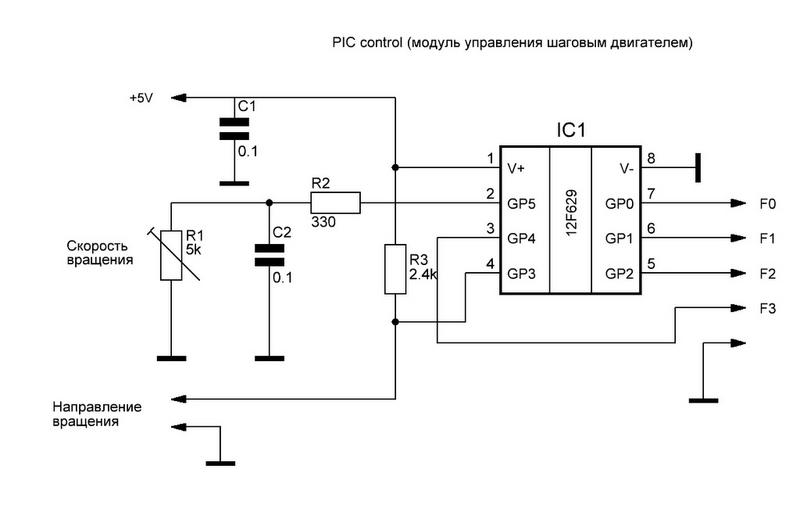
Шаговый двигатель запустить «просто так», подключив к источнику питания не получится. Для этого я изготовил небольшой контроллер шагового двигателя на микропроцессоре 12F629. Это небольшая микросхема позволила заставить двигаться шаговый двигатель в нужном направлений и с нужной скоростью. Вот схема контроллера:
Хочу отметить, что данная конструкция подойдет для проверки практически любых шаговых двигателей. Просто на выходе микроконтроллера следует использовать соответствующие мощности повторители-драйвера. В данном случае я использовал специализированную микросхему ULN2003 — семь вентилей с диодной защитой в одном корпусе.
Рисунок печатной плата в формате SprintLoyout и прошивку для микроконтроллера можно загрузить здесь. Плата разведена под SMD деталюшки, просто мне так удобнее.
Небольшое видео работы азимутального датчика в переделываемом поворотном устройстве
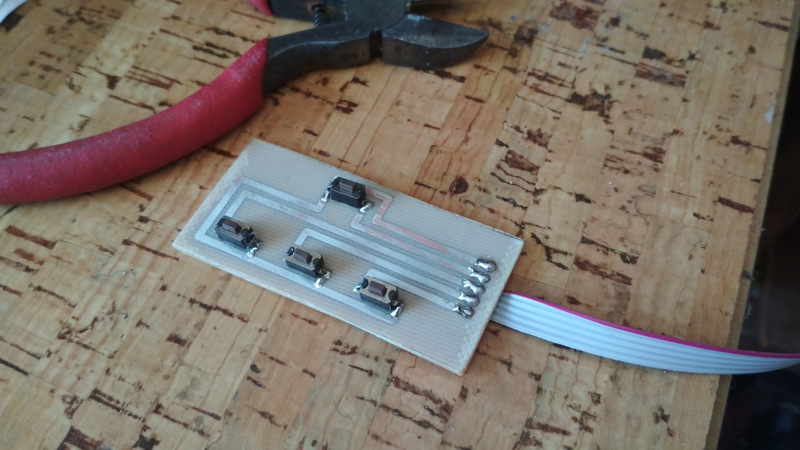
В этом видео, управление двигателем со стрелкой-флажком я осуществлял при помощи кнопок. Вот такая платка с кнопочками для управления по азимуту и элевации
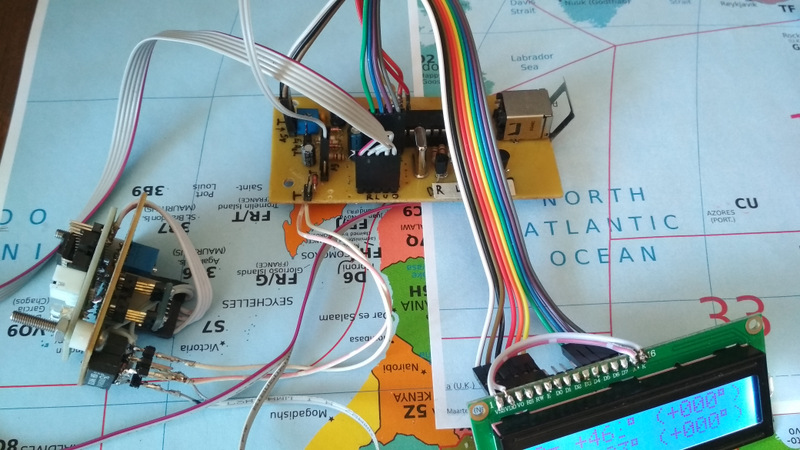
На следующем снимке, слева виден контроллер шагового двигателя со стандартной платой драйвера, по центру микропроцессорный интерфейс для связи поворотного устройства с компьютером через USB, ну и его дисплей.
Программы, спутниковые трекеры, такие как Orbitron и др. умеют управлять поворотными устройствами с двумя плоскостями вращения, чаще всего для этого используются наборы команд GS-232 и EasyComm I. Несколько лет назад Howard Long (G6LVB) разработал замечательный интерфейс на простом и доступном PIC процессоре. Последняя версия прошивки микропроцессора v.07 использует продвинутый протокол обработки данных АЦП с «плавающей точкой». В ней поддерживается стандартный набор команд GS-232, кроме того добавлен расширенный набор команд GS-232, при обнаружении использования протокола Easycomm переключение между протоколами происходит автоматически.
На оригинальной странице проекта автор пробовал перевести свою разработку на коммерческие рельсы. Я не знаю как там пошло дело, но нам нет резона покупать то что мы сами умеем. Спасибо автору за свободное распространение программного обеспечения своего проекта.
В сети можно найти несколько вариантов печатных плат этого интерфейса, например тут и описание самого интерфейса. Я использовал для своего проекта печатную плату от RX9A, с немного дорогой, но надежной микросхемой FT232RL на борту. Самое важное свойство этого интерфейса — хорошая, безглючная поддержка в операционных системах Windows 7 и 10. Это очень важная характеристика, никому не хочется возится с драйверами каждый раз при подключении интерфейса к компьютеру.
Большинство современных компьютеров уже не имеют COM-портов, поэтому хорошая микросхема преобразователя USB-COM есть важный элемент конструкции. И даже потеря возможности внутрисхемного программирования процессора в этом случае не сильно «напрягает», программа более не развивается и ждать обновлений не стоит.
Программа интерфейса настолько умна, что при правильной калибровке, соображает как вести спутник проходящий через север по азимуту. Эта конструкция благодаря своей простоте и возможности подключения самых разнообразных «фирменных» или самодельных поворотных устройств остаётся вне конкуренции для повторения в домашних условиях.
Немного правленый, для используемых мною транзисторов BC547, файл печатной платы и схему забираем здесь. Там же в архиве .hex файл прошивки микроконтроллера и, для самых любознательных, исходник программы на языке С.
Правдами ли, неправдами, но досталась мне поворотка для укв антенн типа такой. Все тут замечательно сделано, качественно и добротно и даже питание в 110 Вольт не проблема.
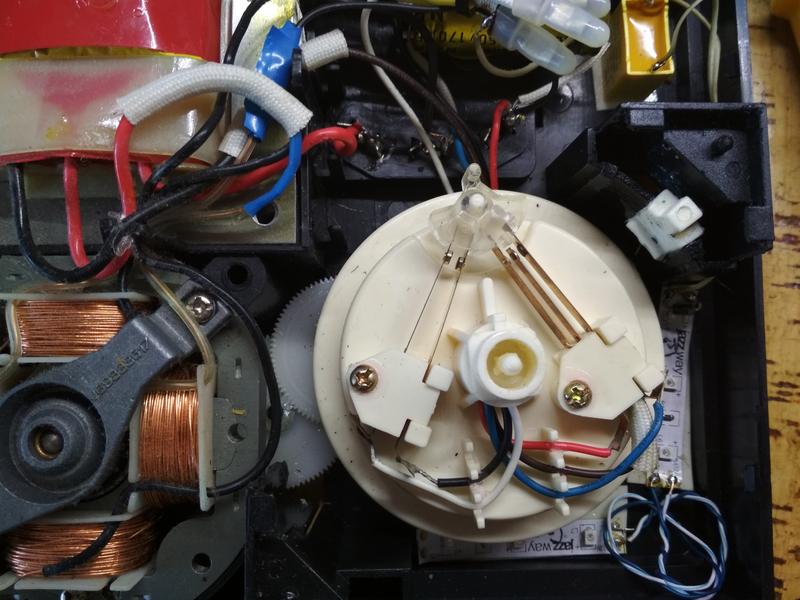
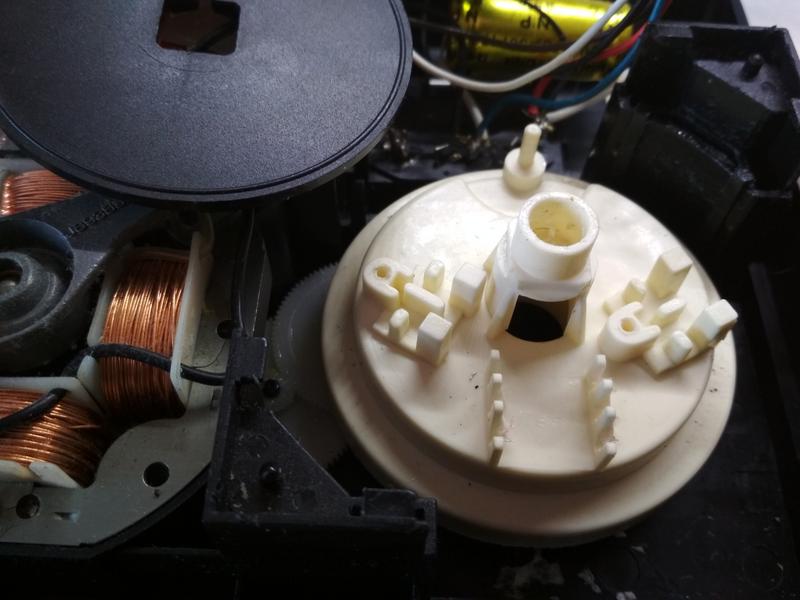
Но есть огромный, по нашему времени, минус — механическое управление и невозможность подключения компьютера для отслеживания радиолюбительских спутников. Было решено устранить этакие недостатки. Начнем с разборки блока управления. Под крышкой видим такую картину, ручка управления снята:
Хорошо заметны контактные группы направления вращения и отключения питания. Вся эта белая фиговина вращается через шестерёночный редуктор, а ручкой управления мы замыкаем контакты направления и питания до тех пор пока весь механизм не повернётся на заданный ручкой угол. Может и сложно кажется, но если внимательно разобраться всё понятно. Из двух двигателей, наверху и внизу, соединенных трехпроводной линией, построен электро-механический мост. Проворачивание одного из двигателей, заставляет и второй двигатель двигаться до остановки первого.
Это всё про технологию поворотного устройства, можно начинать модификации и переделки.
Для начала удаляем все контактные группы с их проводами, не забыв записать цветовую формулу, что куда. Синий, красный, с общим коричневым — направление движения, а черный и белый — отключение питания, т.е. разрыв цепи питания электродвигателя.
Общая идея такова. Нужно установить датчик отключения питания на вращающуюся часть, а угол поворота задавать стрелочным флажком. Как только стрелка-флажок передвинутся их зоны действия датчика, включится питание двигателя блока управления и он будет вращаться до момента срабатывания, т.е. пока не догонит стрелку-флажок, и остановится. Соответственно и поворотный механизм с антенной провернется на заданный стрелкой-флажком угол. Всё гениальное просто…
Теперь решим что можно использовать для управления стрелкой-флажком. Ну конечно же, доступный и дешевый шаговый двигатель от наших азиатских друзей.
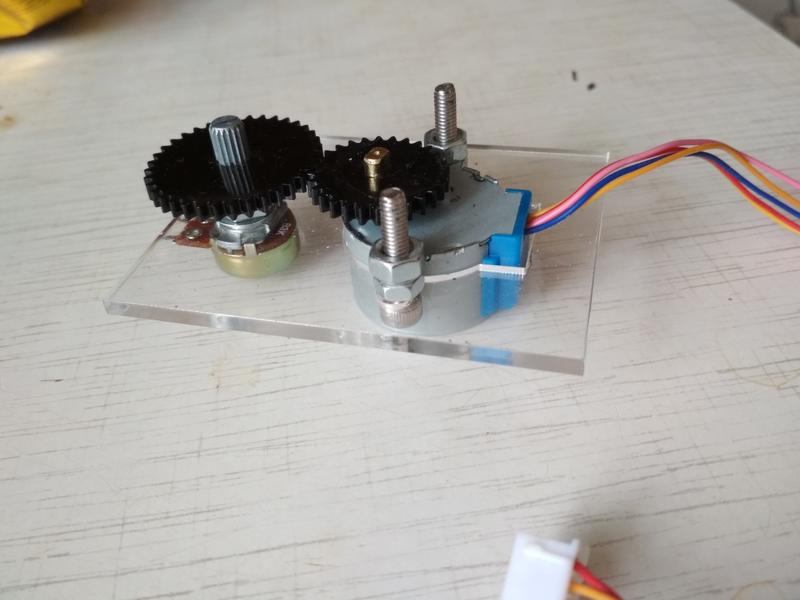
Вот так выглядит блок шагового двигателя с редуктором для датчика, в качестве которого выступает обычный переменный резистор. Тут можно использовать почти любой потенциометр класса А. Про датчики и микропроцессоры расскажу как нибудь позже.
Вот так прилепился к нашему блоку управления модуль шагового двигателя и датчика:
Ось шагового двигателя удлиненна, она проходит через блок управления, а на конце установлена стрелка-флажок. Редуктор модуля шагового двигателя рассчитан таким образом, чтобы 360 градусов поворота оси двигателя превратить в 280 градусов поворота переменного резистора.
А вот так выглядит стрелка-флажок и датчик на оптической паре с открытым каналом, справа плата реле отключения питания «Cut Power»:
 Разъём припаян к контактным площадкам удаленной микросхемы
Разъём припаян к контактным площадкам удаленной микросхемы