Поворотное устройство для УКВ антенн (продолжение)
Сегодня покажу немного «схем электрических принципиальных». На картинке модуль шагового двигателя, реле отключения питания и общая схема управления поворотным устройством.

На рисунке выше, в схеме реле отключения питания «Cut Power» закралась ошибка, сопротивление в цепи диода имеет номинал 220 Ом, а резистор в цепи коллектора фототранзистора — 10 кОм. В качестве ключевого транзистора я использовал BC547, оптическая пара с открытым каналом досталась мне при разборке старого принтера.
Шаговый двигатель запустить «просто так», подключив к источнику питания не получится. Для этого я изготовил небольшой контроллер шагового двигателя на микропроцессоре 12F629. Это небольшая микросхема позволила заставить двигаться шаговый двигатель в нужном направлений и с нужной скоростью. Вот схема контроллера:
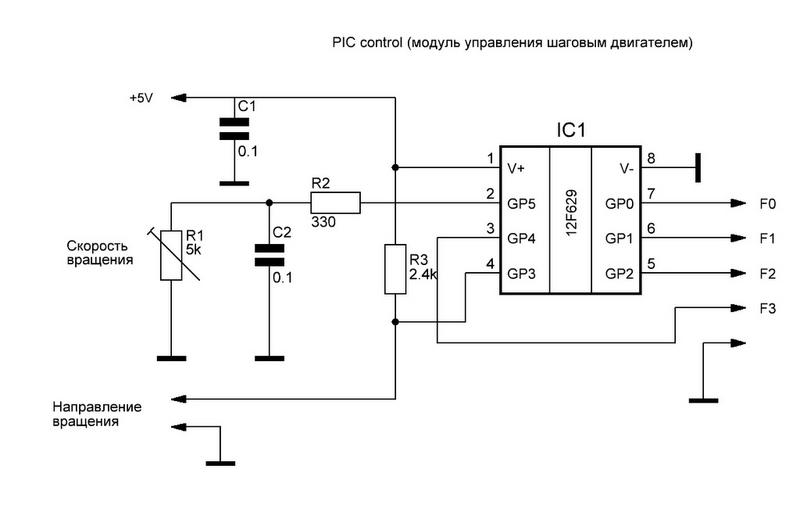 Хочу отметить, что данная конструкция подойдет для проверки практически любых шаговых двигателей. Просто на выходе микроконтроллера следует использовать соответствующие мощности повторители-драйвера. В данном случае я использовал специализированную микросхему ULN2003 — семь вентилей с диодной защитой в одном корпусе.
Хочу отметить, что данная конструкция подойдет для проверки практически любых шаговых двигателей. Просто на выходе микроконтроллера следует использовать соответствующие мощности повторители-драйвера. В данном случае я использовал специализированную микросхему ULN2003 — семь вентилей с диодной защитой в одном корпусе.
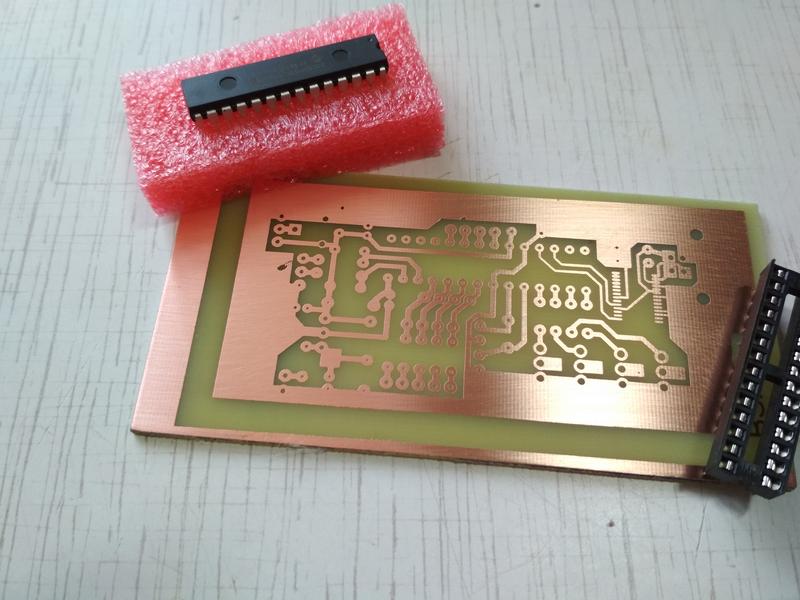
Рисунок печатной плата в формате SprintLoyout и прошивку для микроконтроллера можно загрузить здесь. Плата разведена под SMD деталюшки, просто мне так удобнее.
Небольшое видео работы азимутального датчика в переделываемом поворотном устройстве
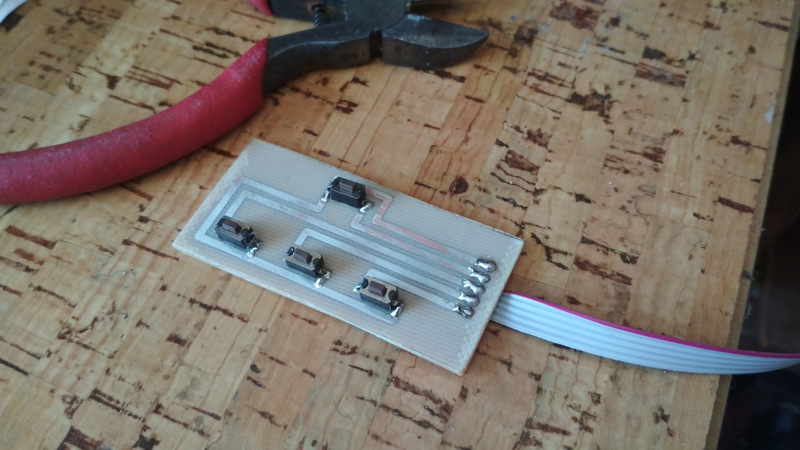
В этом видео, управление двигателем со стрелкой-флажком я осуществлял при помощи кнопок. Вот такая платка с кнопочками для управления по азимуту и элевации
На следующем снимке, слева виден контроллер шагового двигателя со стандартной платой драйвера, по центру микропроцессорный интерфейс для связи поворотного устройства с компьютером через USB, ну и его дисплей.
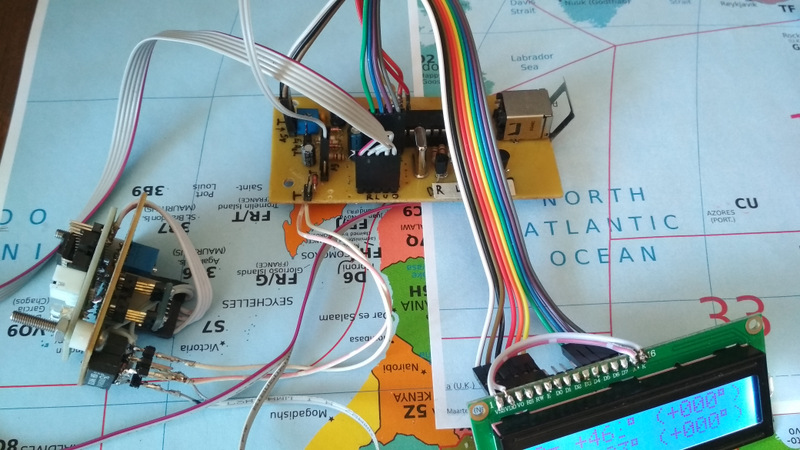
Программы, спутниковые трекеры, такие как Orbitron и др. умеют управлять поворотными устройствами с двумя плоскостями вращения, чаще всего для этого используются наборы команд GS-232 и EasyComm I. Несколько лет назад Howard Long (G6LVB) разработал замечательный интерфейс на простом и доступном PIC процессоре. Последняя версия прошивки микропроцессора v.07 использует продвинутый протокол обработки данных АЦП с «плавающей точкой». В ней поддерживается стандартный набор команд GS-232, кроме того добавлен расширенный набор команд GS-232, при обнаружении использования протокола Easycomm переключение между протоколами происходит автоматически.
На оригинальной странице проекта автор пробовал перевести свою разработку на коммерческие рельсы. Я не знаю как там пошло дело, но нам нет резона покупать то что мы сами умеем. Спасибо автору за свободное распространение программного обеспечения своего проекта.
В сети можно найти несколько вариантов печатных плат этого интерфейса, например тут и описание самого интерфейса. Я использовал для своего проекта печатную плату от RX9A, с немного дорогой, но надежной микросхемой FT232RL на борту. Самое важное свойство этого интерфейса — хорошая, безглючная поддержка в операционных системах Windows 7 и 10. Это очень важная характеристика, никому не хочется возится с драйверами каждый раз при подключении интерфейса к компьютеру.
Большинство современных компьютеров уже не имеют COM-портов, поэтому хорошая микросхема преобразователя USB-COM есть важный элемент конструкции. И даже потеря возможности внутрисхемного программирования процессора в этом случае не сильно «напрягает», программа более не развивается и ждать обновлений не стоит.
Программа интерфейса настолько умна, что при правильной калибровке, соображает как вести спутник проходящий через север по азимуту. Эта конструкция благодаря своей простоте и возможности подключения самых разнообразных «фирменных» или самодельных поворотных устройств остаётся вне конкуренции для повторения в домашних условиях.
Немного правленый, для используемых мною транзисторов BC547, файл печатной платы и схему забираем здесь. Там же в архиве .hex файл прошивки микроконтроллера и, для самых любознательных, исходник программы на языке С.